Academic | Individual Work | 2018
Professor: Alexander Kitchin
Professor: Alexander Kitchin
The recreated rubber hand improves itself in grasping objects with a suction cup system. The new system evolved from different options and can be analyzed and redeveloped for maximum utility and comfort. The model is brought to life by casting for one to see the difference in ideas and results between concept and final product. The initial and final casts can be mass produced with a special casting system, made possible with a unique way of creating a common and smart mold. The goal is to understand the path taken to create the final product, analyze the intentions and see a functioning system of mass production that can help new ideas to flourish.
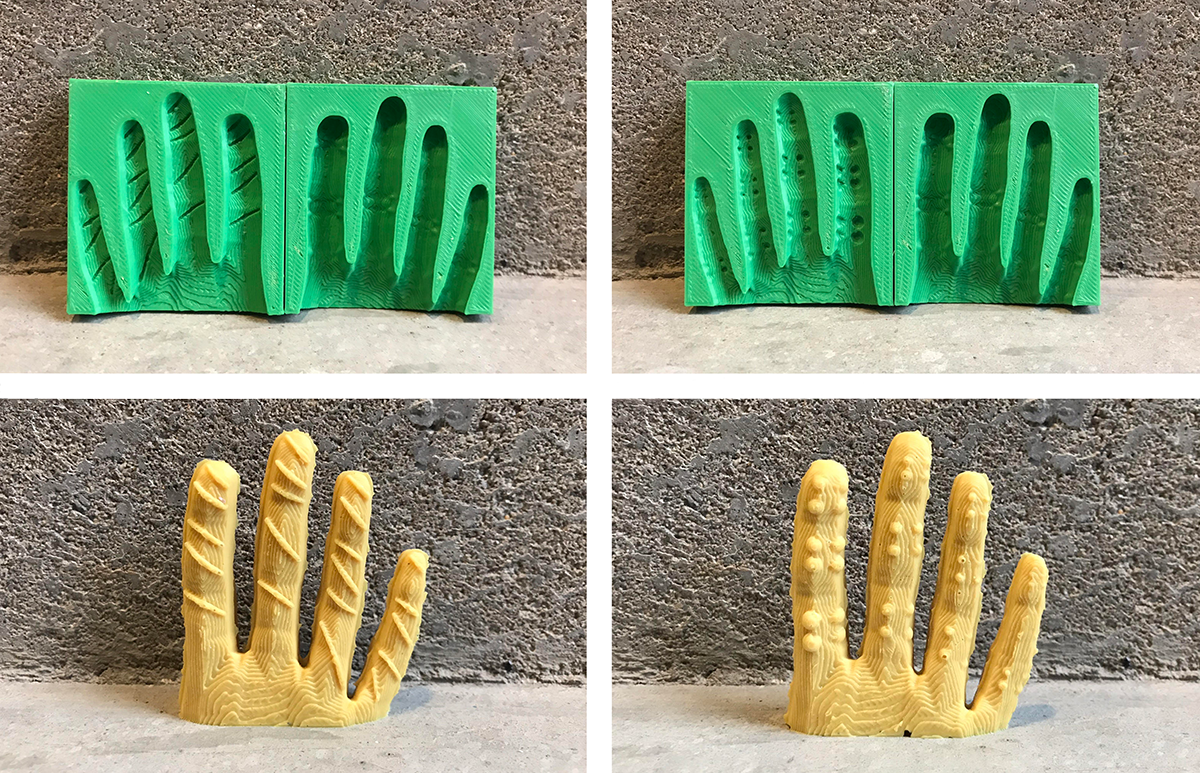
The self-casted rubber hand was 3D scanned with Geomagic, resulting in a 3D model which was altered in Rhino and later re-casted using a 3D Printed mold and wires which allowed the rubber hand to bend permanently.



SELF CASTED RUBBER HAND & ALTERED HAND DESIGN
3D PRINTED MOLD
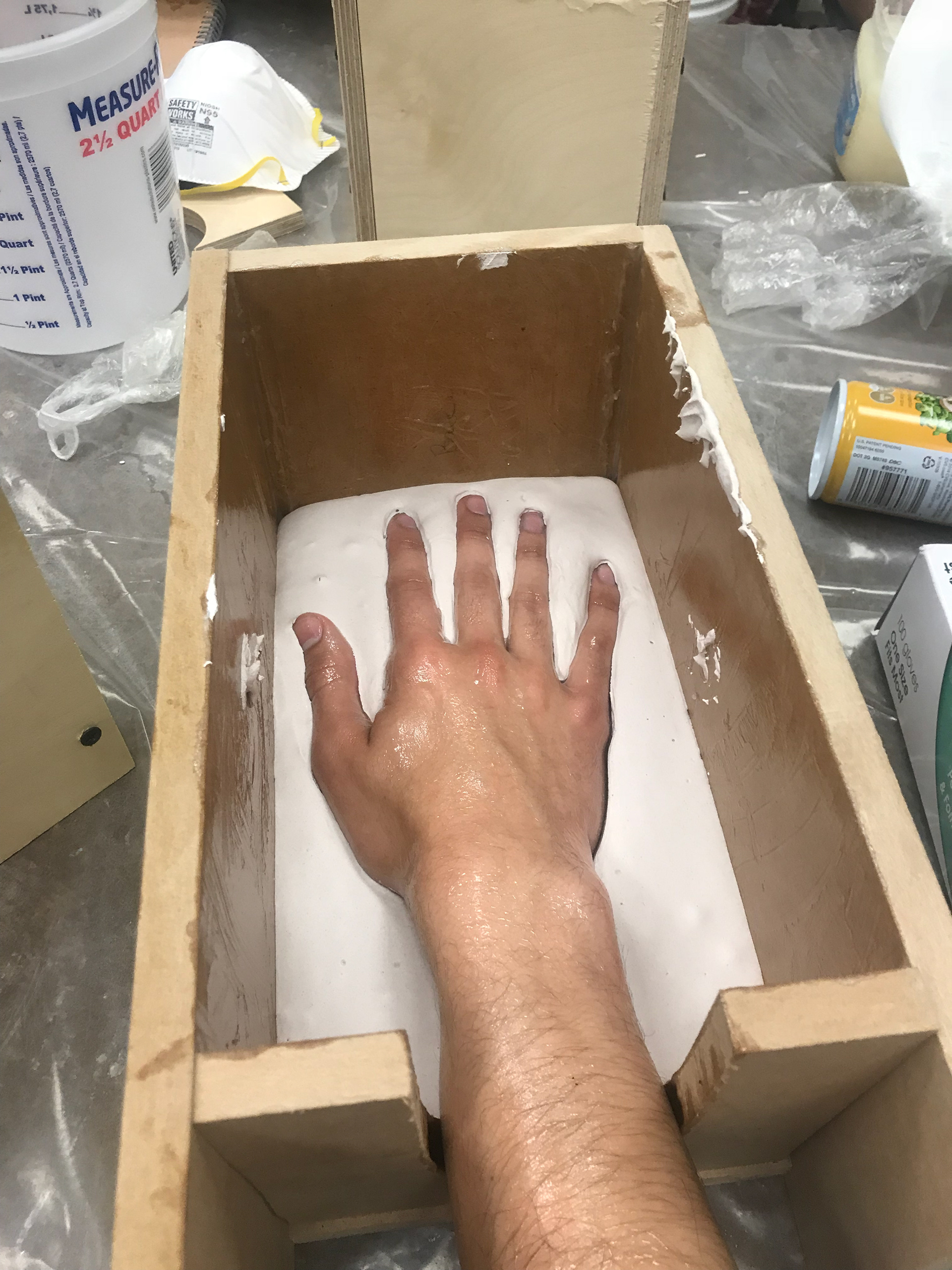



RUBBER CASTING & 3D SCANNING OF RUBBER HAND
3D SCANNING WITH GEOMAGIC
FUNCTION ITERATIONS AND SKETCHES